
LOS
追踪控制算法中的视线法(Pure Pursuit Algorithm) 是一种常用于无人车、自主机器人或自动驾驶系统的路径跟踪算法。它的核心思想是通过确定一个“目标点”,使车辆以特定的转向角调整其行驶方向,从而逐步靠近预定路径。
视线法的基本原理
- 视线点:
- 视线点是路径上一个期望的参考点,航向调整是基于该点的相对位置。通常,视线点位于当前位置前方的某个固定或动态计算的距离处。
- 从当前位置沿着路径找到一个距离为“前视距离”(Lookahead Distance)的目标点。
- 如果当前并不在规划的路径上,则计算当前位置在路径上的垂直投影点(如果投影点存在)。从该投影点沿路径方向距离为“前视距离”的目标点。
- 前视距离
- 是从当前位置(或投影点)到视线点的距离。
- 前视距离的选取直接影响路径跟踪的性能:
- 较小的前视距离:能够紧密跟随路径,但可能会有较大的横向偏差或高频振荡。
- 较大的前视距离:路径跟踪更平滑,但转向可能较迟缓,导致较大的路径误差。
横向误差
当前位置不在规划的路径上时,当前的位置到参考路径的垂直距离为横向误差视线角
视线角是AUV当前位置到视线点连线与惯性坐标系(或北向)正方向之间的夹角。
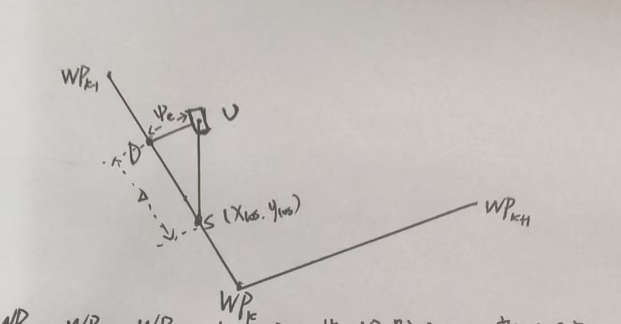
如图所示,设路径由一系列路径点(Waypoints)$\mathrm{WP}{k-1}$, $\mathrm{WP}_k$, $\mathrm{WP}{k+1}$, $\dots$ 构成,车辆当前位于位置点 $U$,其在惯性坐标系中的位置为 $(x, y)$。将车辆在路径上的投影点记为 $D$,其坐标为 $(xd, y_d)$。从投影点 $D$ 向路径方向前进一个前视距离 $L_d$,可获得视线点 $(x{los}, y_{los})$,用于引导控制。
(1)横向误差(Lateral Error)
车辆当前位置 $(x, y)$ 与其在路径上的垂足 $(x_d, y_d)$ 之间的距离定义为横向误差 $y_e$,其计算公式为:
(2)视线角(Line-of-Sight Angle, LOS Angle)
视线角 $\psi{LOS}$ 是从当前位置 $(x, y)$ 指向视线点 $(x{los}, y_{los})$ 的方向角,可表示为:
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来源 十柒!
评论




