
前馈补偿的PID控制
前馈补偿的PID控制是在传统PID控制中引入前馈补偿通道,提前对系统的已知扰动或输入信号进行补偿,从而增强控制系统的响应速度与抗扰能力。
前馈控制
反馈控制系统中,反馈是按照偏差进行控制的,即,在干扰的作用下,被控量先偏离期望值,然后控制器才按照偏差产生控制信号去抵消干扰的影响,达到期望值。如果干扰不断施加,则系统总是跟在干扰作用后面波动,只能对已经发生的误差进行修正,存在一定的滞后性。
前馈控制是按照扰动量进行补偿的开环控制,即,在扰动出现之前,控制器先根据扰动量产生控制信号去补偿扰动的影响,使被控量提前达到期望值。前馈控制可以减少或消除扰动对被控量的影响,提高系统的响应速度和抗扰能力。
前馈控制为一个开环控制系统,在实际应用中,常常采用反馈+前馈的复合控制方式,即,先进行前馈控制,然后进行反馈控制,以进一步提高系统的性能。
前馈补偿的PID控制
前馈补偿的PID控制的基本原理是,根据系统的输入信号和扰动信号,计算出前馈补偿量,然后将前馈补偿量加到PID控制器的输出端,从而实现对系统扰动的补偿。
经典控制理论中的前馈控制设计是基于复合控制思想的,当闭环系统为连续系统时,使前馈环节与闭环系统的传递函数之积为1,从而实现输出完全复现输入。结构图如下所示: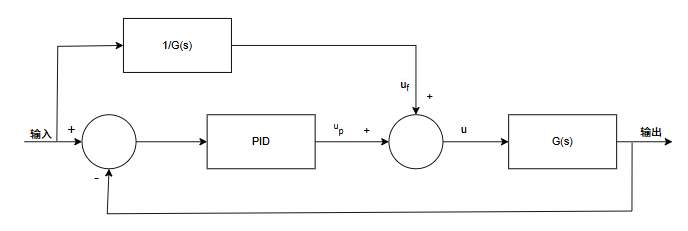
设计前馈控制器为:
总控制输出为PID控制输出加前馈控制输出:
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来源 十柒!
相关推荐

2024-12-18
串级PID控制
...

2024-11-16
PID控制算法
一、什么是PID PID 是比例-积分-微分控制(Proportional-Integral-Derivative Control)的缩写,是一种经典的控制算法,广泛应用于工业自动化中。它基于反馈控制原理,通过调整控制器的输出,确保被控对象的输出达到期望值(目标值)。 常用术语: 被控对象:需要控制的对象。 目标值:期望被控对象达到的状态量。 当前值:被控对象当前时刻的状态量。 反馈值:被控对象当前时刻的状态量。 输出量:控制器输出量,即PID的计算结果 误差:目标值-反馈值(当前值) 稳态误差:系统稳定状态下仍存在的误差。 1.1. PID的核心PID控制由三个部分组成: 比例(P,Proportional) 根据当前误差大小进行控制,输出与误差成正比。 比例控制的作用是快速响应误差,但可能会导致稳态误差。 数学表达式:$Pout = Kp * e(t)$其中,$Kp$ 是比例增益,$e(t)$...
评论




